Hans M. und ich ham vor über 8 Jahren mal eine Regelung für sein Ferienhaus gebaut: https://stefan.box2code.de/2018/05/11/warm-wasser-steuerung/
Neulich kamen wir mal wieder auf das Thema und ham entschieden dass wir das heute viel einfacher, besser und vorallem schneller könnten. Tatsächlich ham wir bis jetzt nur 2 Wochenenden dafür gebraucht
Die neue Regelung basiert jetzt auf Linux mit QT/QML-Applikation. Zu finden hier: https://bitbucket.org/bobbery/wwc2/src/main/
Alles in Allem besteht die ganze Anwendung aus unter 500 Zeilen einfachen QML-Code der unglaublich primitiv und daher wahrscheinlich auch gut zu warten ist.
Der C++ – Code enthält nur ein paar Treiber, mit denen man aus dem QML-Code heraus leicht die Hardware ansprechen kann.
Die Applikation ist noch nicht ganz fertig (es fehlt noch die eigentliche Regelschleife), da sich ein Großteil der Hardware grad noch in Italien befindet. Ich schreib hier wenn gar fertig und mit Hardware getestet
Update 2026-07-14: Regelung ist komplett implementiert und rudimentär getestet
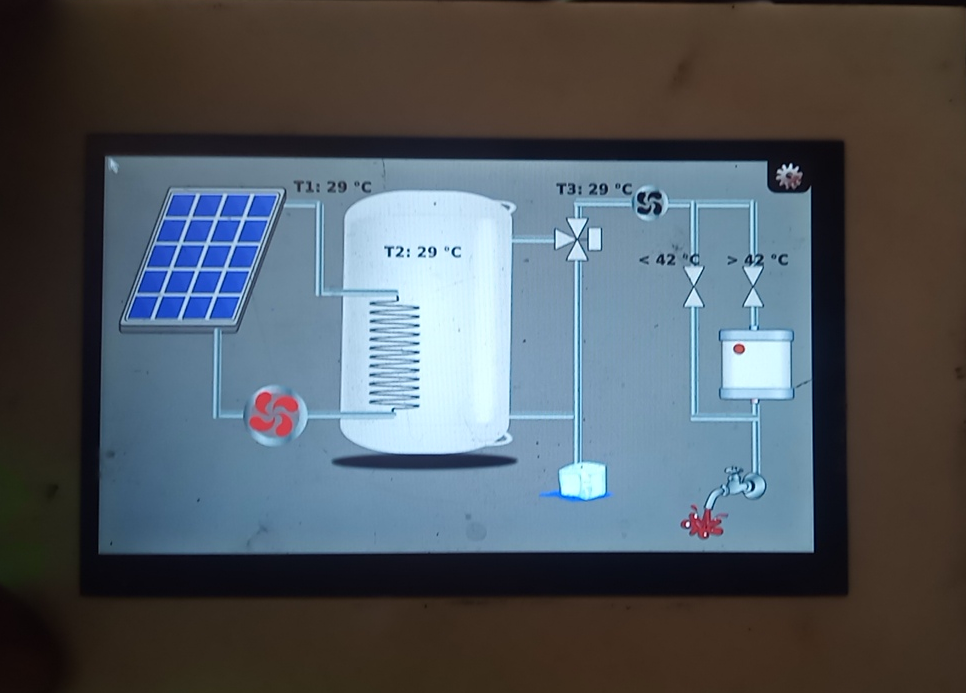
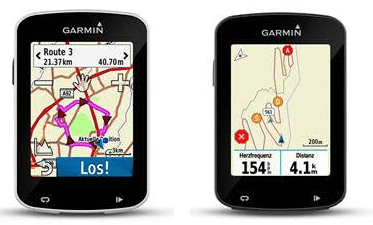
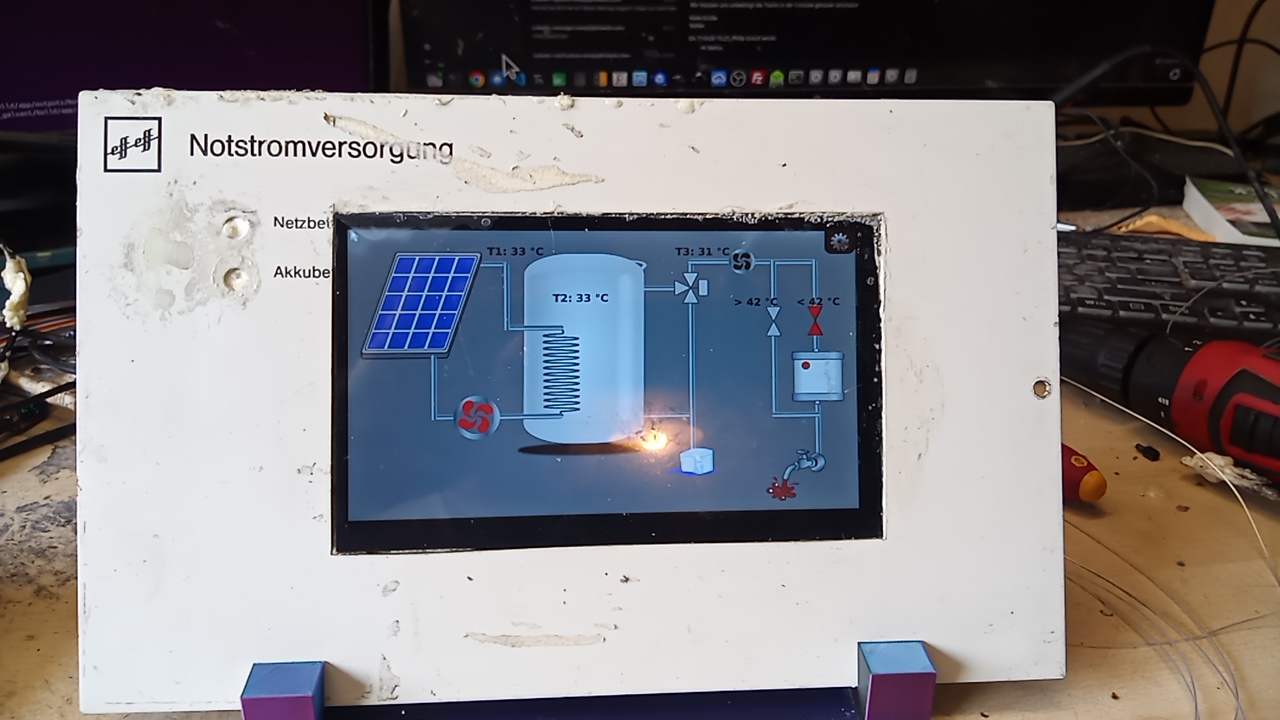
Das Hauptbild ist einfach mit Inkscape und Cliparts von https://openclipart.org/ gezeichnet
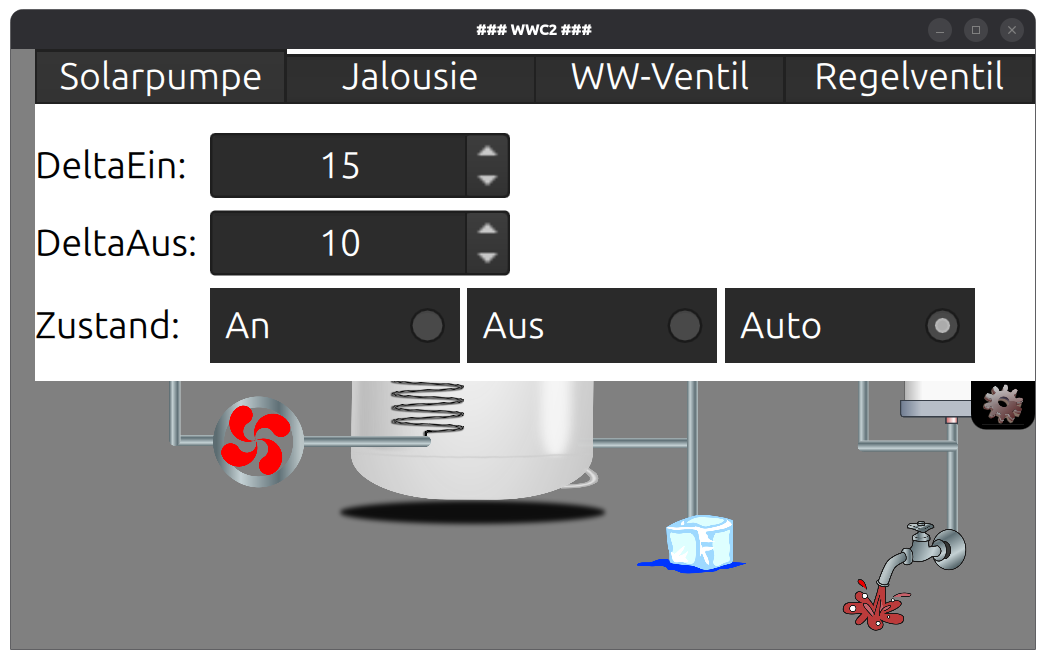
Natürlich lassen sich die Parameter der Regelung leicht über TouchPad ändern und beiben nach Neustart erhalten:
Du kannst dir das Repo klonen und erstmal einfach im QtCreator auf deinem PC ausführen. Etwas interessanter ist aber wie man das Ding auf den Linux-Controller bekommt und wie man am geschicktesten die Hardware anbindet
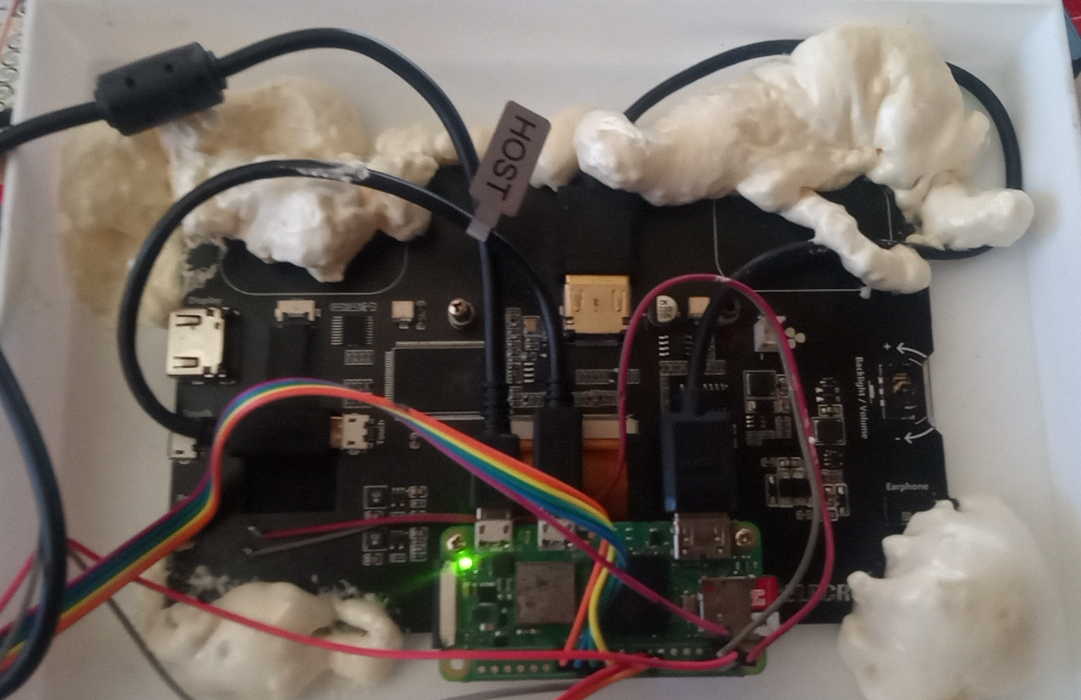
Alles bissle fixiert für Transport nach Italien
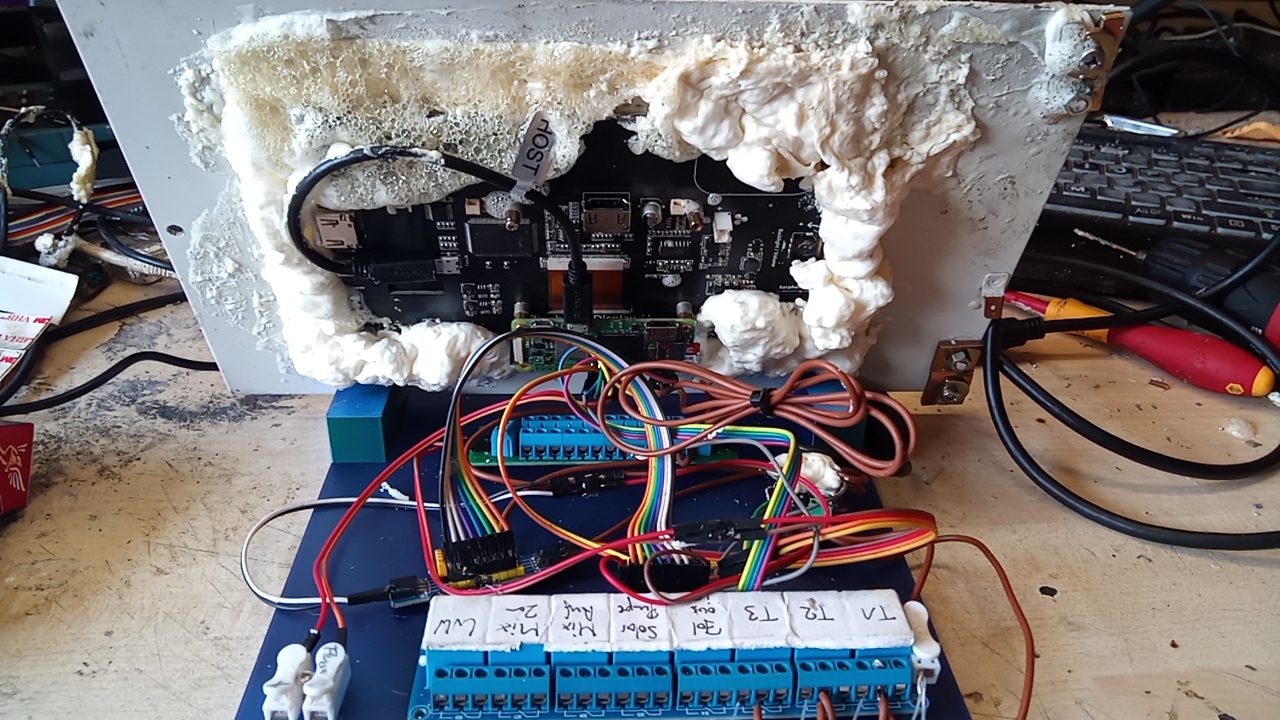
Die Hardware
- RPI-Zero 2W: weil der schön klein und billig is 🙂
- HDMI-TS-Display 7″ – bekommt man für um die 40€ – über HDMI und USB angeschlossen
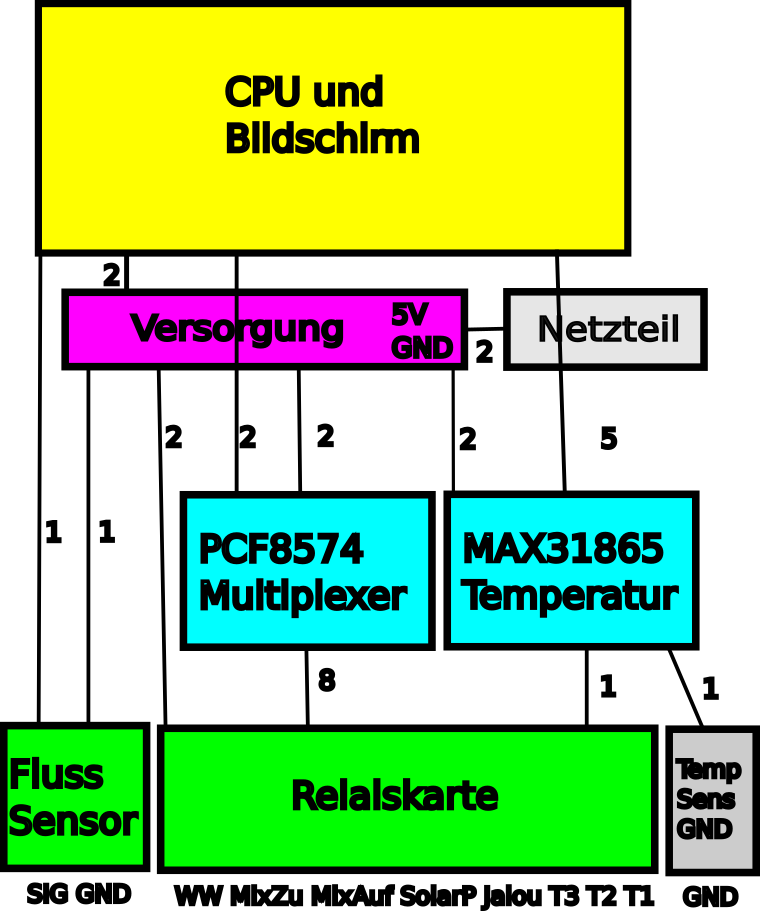
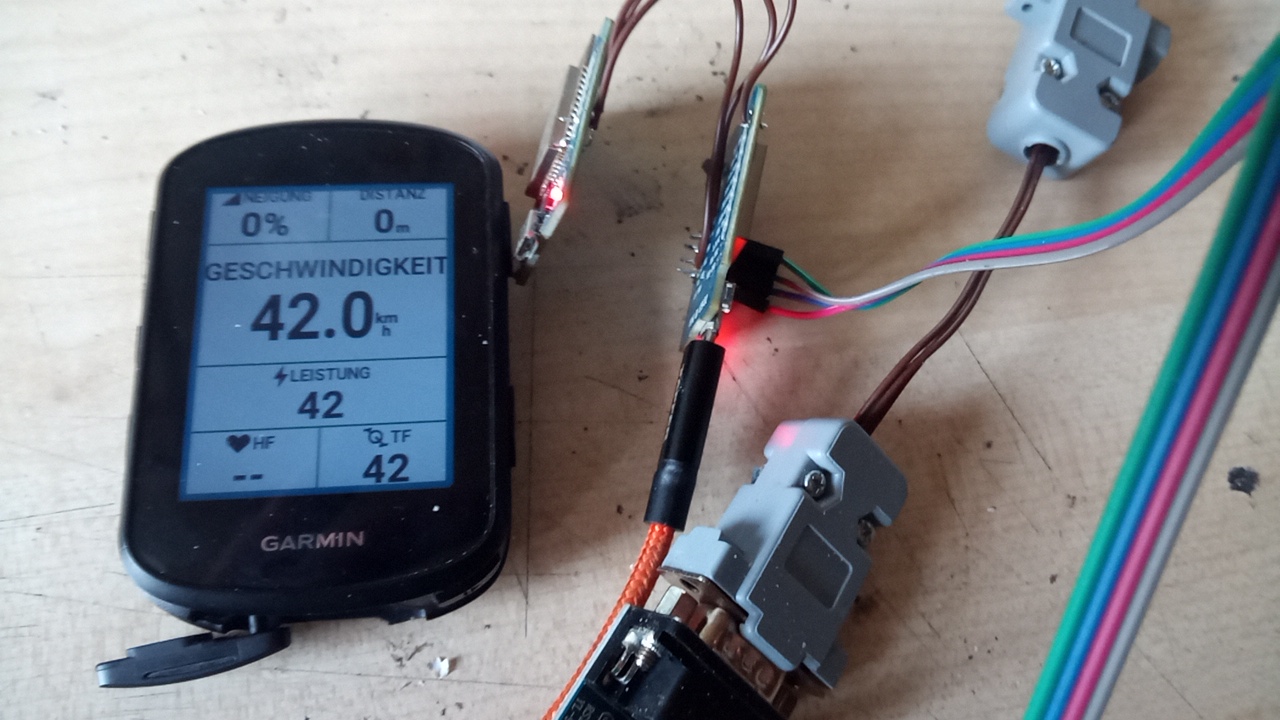
- Einen MAX31865 – mit dem kann man einfache Widerstands-Temperatursensoren (PT-100) auslesen – wir brauchen 4 Sensoren aber nur einen MAX31865 da wir die Sensoren einfach über Relais multiplexen
- Eine 8-Fach Relaiskarte – bekommt man für unter 10€
- Einen PCF8574 – mit dem bekommen wir die Relaiskarte angesteuert
- Einen Flusssensor, der impulse liefert wenn Wasser durchfließt
Alles in allem unter 100€ Material. Das Gehäuse ist einfach mit dem 3D-Drucker gedruckt.
Befestigt ist das Ganze mit etwas Bauschaum. Wenn du dich fragst warum Bauschaum: Wir hatten auf Arbeit mal bei einem Prototypen ein Display mit Heißkleber fixiert. Leider stand das ganze dann mal für eine Weile in der Hitze von Miami und viel auseinander 🙁 Deshalb auf keinen Fall mehr Heißkleber 🙂
Wir benutzen am RPI nur wenige Pins:
- GPIO23 als Eingang für den Flusssensor (auf Tastaturtaste F12 gemapped)
- SDA und SCL (GPIO2 & 3) zum Ansteuern der Relaiskarte über PCF8574 (da man mehrere Bausteine an einem Bus betreiben kann könnten wir damit sogar bis zu 64 Relais schalten)
- MOSI, MISO, SCK, CS (GPIO8-11) zum Auslesen der PT-100 Sensoren über MAX31865
Normalerweise bau ich mir fast immer ein eigenes Linux-Image mit buildroot. Da hier aber Einfachheit zählt und die Bootzeit ziemlich egal ist, nehmen wir einfach ein fertiges Raspberry Pi OS Lite
Wie man ein eigenes Linux aufsetzt findest du hier: https://stefan.box2code.de/2022/05/27/embedded-linux-remote-debugging-mit-rpi-zero-buildroot-und-qt/
Linux Image vorbereiten
Am einfachsten geht das über den Raspberry Pi Imager. Sorge beim Flashen nur dafür, dass SSH aktiviert und mit deinem WLAN verbunden wird.
Läuft dein PI, dann verbinde dich über SSH und installiere mit sudo apt install qt6-*{dev}* cmake Alles was wir so brauchen.
Ändere deine /boot/firmware/config.txt auf folgenden Inhalt
dtparam=spi=on
dtparam=i2c_arm=on
dtoverlay=vc4-kms-v3d
dtoverlay=gpio-key,gpio=23,active_low=1,gpio_pull=up,keycode=88 # mapped to F12
Danach ist ein Reboot angebracht
Kopiere den Quellcode in dein Heimatverzeichnis auf dem PI (mit scp, FileZilla, WinSCP, o.ä.)
Mache dir ein Verzeichnis build in deinem Heimatverzeichnis auf dem PI und führe aus dem Verzeichnis heraus cmake ../wwc2; make aus.
Jetzt kannst du die Applikation mit ~/build/appwwc2 -platform eglfs starten
Damit das beim starten automatisch passiert, kannst du den Befehl an deine ~/.bashrc am Ende anhängen
Aktiviere noch schnell über sudo raspi-config den Auto-Login
Wenn du jetzt neu startest, sollte nach dem Booten die Applikation laufen
(optional) Image wartbar machen
Damit du auch außerhalb deines WLANs auf deinen PI zugreifen kannst, packst du in deine /etc/profile die Zeile nmcli device wifi hotspot ssid wwc2 password 12345678 so macht dein PI einen WLAN-Hotspot auf. SSH funktioniert dann über die Adresse 10.42.0.1
Und noch a einfaches Schaltbild