Mein Vermieter Hans fragte mich neulich ob man irgendwie die Daten seines Ergometers (ein altes Daum ergo_bike) in seinen neuen Fahrradcomputer ( Einen Garmin Edge 820 ) bekommen kann,
da er in seinem Fahrradcomputer gerne seine gesamten Fitnessdaten für Rennrad und Ergometer hätte

Bei Daum bekommt man für das ergo_bike eine schöne Schnittstellenbeschreibung:
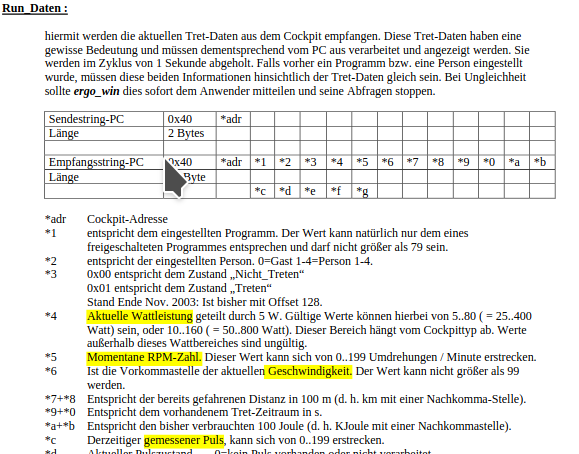
Man kann erkennen, dass die sog. Run_Daten alles enthalten was man so braucht – Leistung, Trittfrequenz, Geschwindigkeit und Puls
Auf der Rückseite des Cockpits findet man den zugehörigen Stecker (oben):

Der Stecker sieht zwar wie RS-232 aus, hat aber etwas andere Pegel (Daum verwendet statt max232 2 Optokoppler für RX und TX) – Deswegen ein PullUp an pin 2 des MAX232.
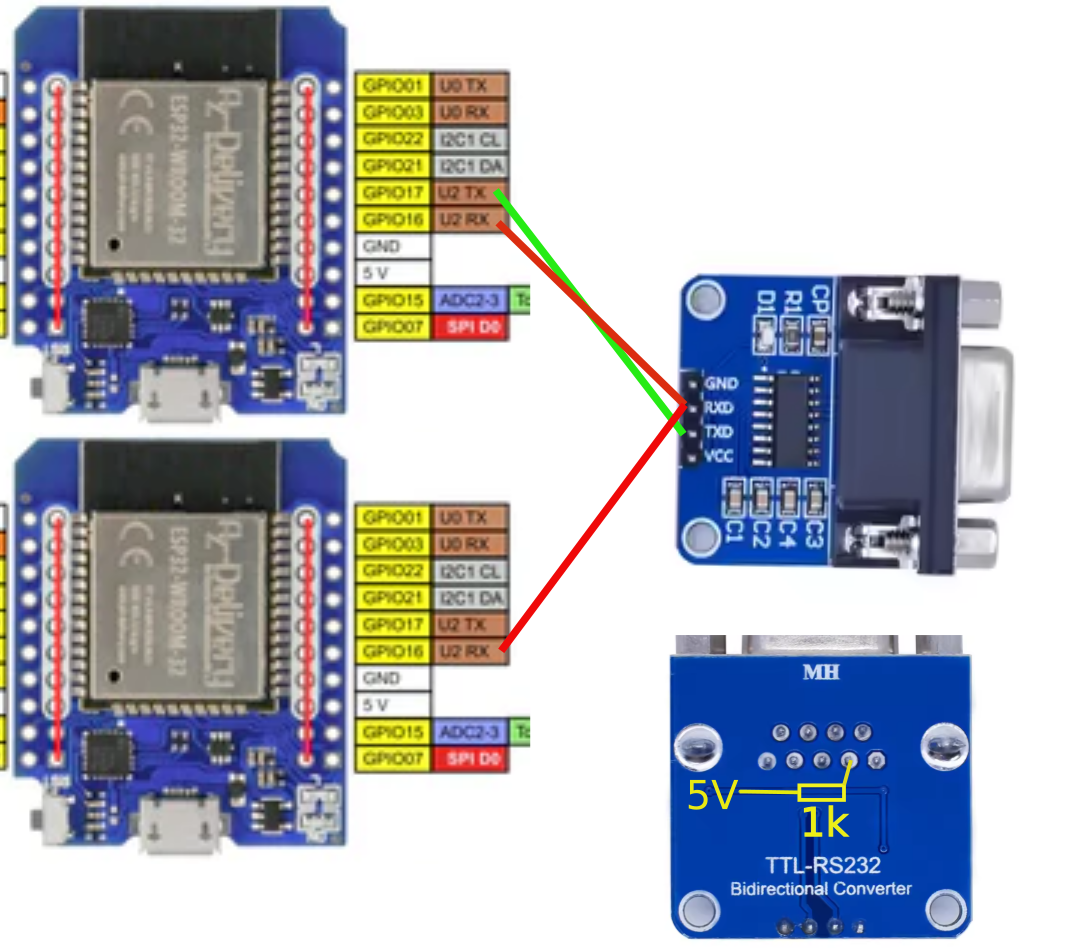
GND und VCC hab ich der Übersichtlichkeit halber nicht eingezeichnet (und natürlich weil ich faul bin 🙂 )
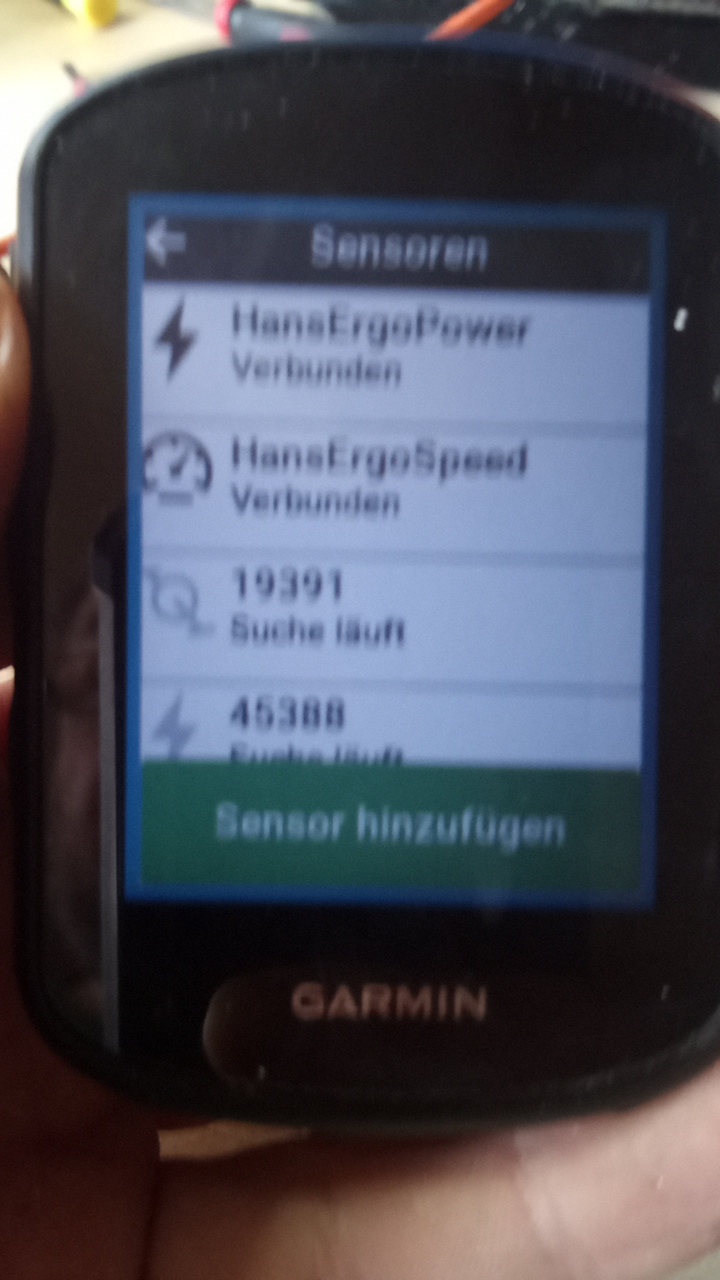
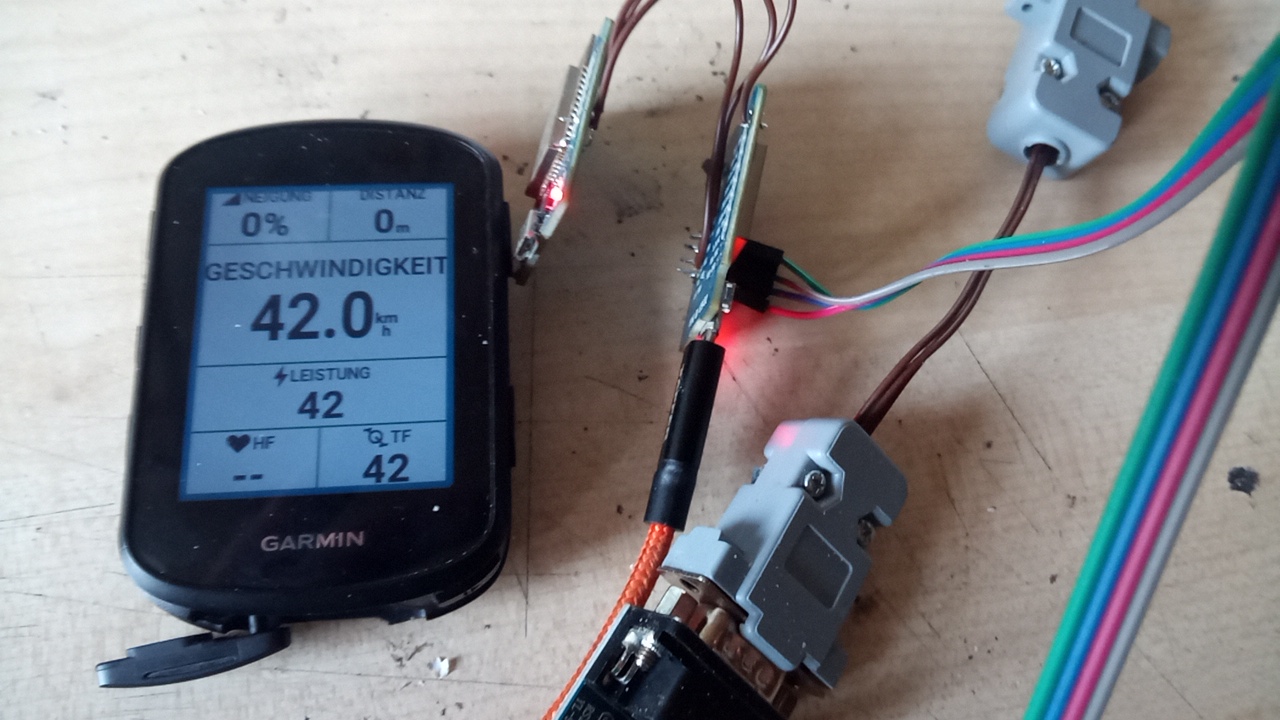
Das war schon die Hardware – du wirst dich wundern warum 2 ESP32. Leider hat der Fahrradcomputer mehrere Sensoren pro Gerät nicht verstanden und es ging nicht anders 🙁
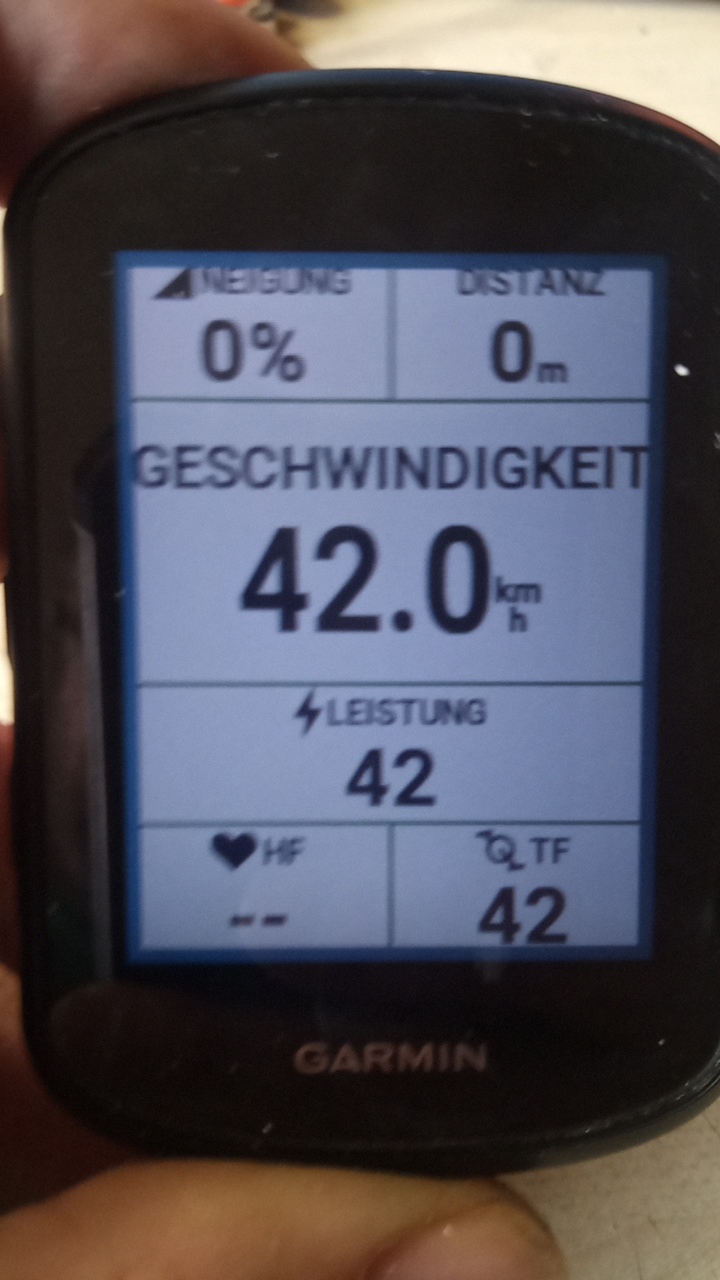
Nach etwas Micropython hats dann funktioniert:
Code Power-Sensor ( für Trittfrequenz, Leistung und Kadenz )
(oberer ESP32)
Tut mir leid, ist etwas schnell und schlampig geschrieben aber erfüllt seinen Zweck ganz gut
Du brauchst Micropython und die Datei https://github.com/micropython/micropython/blob/master/examples/bluetooth/ble_advertising.py aus den Micropython-Beispielen auf deinem Device. Natürlich hab ich mich auch großzügig an den Beispielen dort bedient – ist doch klar 🙂
Das Protokoll zwischen Fahrradcomputern und Sensoren ist am besten beschrieben unter https://www.bluetooth.com/specifications/specs/gatt-specification-supplement-5/
und natürlich viele viele andere Typen von Sensoren (z.B. Temperatur, Luftfeuchte …) man findet für fast Alles was. Vielleicht kannst du hier was brauchen für dein Sensorprojekt – es ist sehr leicht BLE-Sensoren zu implementieren ( besonders mit Micropython, finde ich 🙂 )
import bluetooth
import random
import struct
import time
from ble_advertising import advertising_payload
from micropython import const
from machine import UART
uart = UART(2, 9600)
uart.init(9600, bits=8, parity=None, stop=1)
_IRQ_CENTRAL_CONNECT = const(1)
_IRQ_CENTRAL_DISCONNECT = const(2)
_IRQ_GATTS_INDICATE_DONE = const(20)
_FLAG_READ = const(0x0002)
_FLAG_NOTIFY = const(0x0010)
_FLAG_INDICATE = const(0x0020)
_UUID_POWER = bluetooth.UUID(0x1818)
_POWER_CHAR = (
bluetooth.UUID(0x2A63),
_FLAG_READ | _FLAG_NOTIFY | _FLAG_INDICATE,
)
_POWER_FEAT_CHAR = (
bluetooth.UUID(0x2A65),
_FLAG_READ | _FLAG_NOTIFY | _FLAG_INDICATE,
)
_POWER_LOC_CHAR = (
bluetooth.UUID(0x2A5D),
_FLAG_READ | _FLAG_NOTIFY,
)
_SERVICE_POWER = (
_UUID_POWER,
(_POWER_CHAR,_POWER_FEAT_CHAR,_POWER_LOC_CHAR,),
)
SERVICES = (_SERVICE_POWER,)
class BLEErgo:
def __init__(self, ble, name="HansErgoPower"):
self._ble = ble
self._ble.active(True)
self._ble.irq(self._irq)
((self._handlePower, self._handlePowerFeat,self._handlePowerLoc,),) = self._ble.gatts_register_services(SERVICES)
self._connections = set()
self._payload = advertising_payload(
name=name, services=[_UUID_POWER]
)
self._advertise()
self.lastCrankRev = 0
self.lastWheelRev = 0
self.lastCrankEvent = 0
self.lastWheelEvent = 0
dat = bytearray()
dat.append(0x0C) # speed and cadence
dat.append(0x00)
dat.append(0x00)
dat.append(0x00)
self._ble.gatts_write(self._handlePowerFeat, dat)
dat = bytearray()
dat.append(6) # right crank
self._ble.gatts_write(self._handlePowerLoc, dat)
def _irq(self, event, data):
if event == _IRQ_CENTRAL_CONNECT:
conn_handle, _, _ = data
self._connections.add(conn_handle)
elif event == _IRQ_CENTRAL_DISCONNECT:
conn_handle, _, _ = data
self._connections.remove(conn_handle)
self._advertise()
elif event == _IRQ_GATTS_INDICATE_DONE:
conn_handle, value_handle, status = data
def setPower(self, pwr, rpm, speed, notify=False, indicate=False):
self.lastWheelRev += 1
self.lastCrankRev += 1
self.lastCrankEvent += int(60 / rpm * 1024)
rnd = int(15500 / speed)
self.lastWheelEvent += rnd
print(rnd)
data = bytearray()
data.append(0x30) # wheel and crank rev present
data.append(0x00)
data+= ((int(pwr)).to_bytes(2, 'little'))
data+= ((int(self.lastWheelRev)).to_bytes(4, 'little'))
data+= ((int(self.lastWheelEvent)).to_bytes(2, 'little'))
data+= ((int(self.lastCrankRev)).to_bytes(2, 'little'))
data+= ((int(self.lastCrankEvent)).to_bytes(2, 'little'))
data.append(0x00)
data.append(0x00)
data.append(0x00)
data.append(0x00)
data.append(0x00)
self._ble.gatts_write(self._handlePower, data)
if notify or indicate:
for conn_handle in self._connections:
if notify:
self._ble.gatts_notify(conn_handle, self._handlePower)
if indicate:
self._ble.gatts_indicate(conn_handle, self._handlePower)
def _advertise(self, interval_us=100000):
self._ble.gap_advertise(interval_us, adv_data=self._payload)
def app():
ble = bluetooth.BLE()
ergo = BLEErgo(ble)
while True:
dat = bytearray()
dat.append(0x40)
dat.append(0x00)
uart.write(dat)
time.sleep_ms(10)
dat = bytearray()
while uart.any():
dat += uart.read()
if len(dat) > 14:
speed = dat[7]
cadence = dat[6]
power = dat[5] * 5
pulse = dat[14]
if cadence == 0:
cadence = 1
if speed == 0:
speed = 1
print ("Leistung: " + str(power))
print ("Geschwindigkeit: " + str(speed))
print ("Kadenz: " + str(cadence))
ergo.setPower(power, cadence, speed, notify=True, indicate=False)
else:
ergo.setPower(42, 42, 42, notify=True, indicate=False)
time.sleep_ms(1000)
if __name__ == "__main__":
app()Code Speed-Sensor:
(unterer ESP32)
import bluetooth
import random
import struct
import time
from ble_advertising import advertising_payload
from micropython import const
from machine import UART
uart = UART(2, 9600)
uart.init(9600, bits=8, parity=None, stop=1)
_IRQ_CENTRAL_CONNECT = const(1)
_IRQ_CENTRAL_DISCONNECT = const(2)
_IRQ_GATTS_INDICATE_DONE = const(20)
_FLAG_WRITE = const(0x0001)
_FLAG_READ = const(0x0002)
_FLAG_NOTIFY = const(0x0010)
_FLAG_INDICATE = const(0x0020)
_UUID_SPEED = bluetooth.UUID(0x1816)
_SPEED_CHAR = (
bluetooth.UUID(0x2A5B),
_FLAG_NOTIFY,
)
_SPEED_FEAT_CHAR = (
bluetooth.UUID(0x2A5C),
_FLAG_READ,
)
_SPEED_LOC_CHAR = (
bluetooth.UUID(0x2A5D),
_FLAG_READ,
)
_SPEED_CONTROL_CHAR = (
bluetooth.UUID(0x2A55),
_FLAG_WRITE | _FLAG_INDICATE,
)
_SPEED_CONTROL_CHAR = (
bluetooth.UUID(0x2A55),
_FLAG_WRITE | _FLAG_INDICATE,
)
_SERVICE_SPEED = (
_UUID_SPEED,
(_SPEED_CHAR,_SPEED_FEAT_CHAR,_SPEED_LOC_CHAR,_SPEED_CONTROL_CHAR,),
)
SERVICES = (_SERVICE_SPEED,)
class BLEErgo:
def __init__(self, ble, name="HansErgoSpeed"):
self._ble = ble
self._ble.active(True)
self._ble.irq(self._irq)
((self._handleSpeed,self._handleSpeedFeat,self._handleSpeedLoc,self._handleSpeedControl,),) = self._ble.gatts_register_services(SERVICES)
self._connections = set()
self._payload = advertising_payload(
name=name, services=[_UUID_SPEED]
)
self._advertise()
self.lastWheelEvent = 0
self.lastWheelRev = 0
dat = bytearray()
dat.append(0x01) # speed
dat.append(0x00)
self._ble.gatts_write(self._handleSpeedFeat, dat)
dat = bytearray()
dat.append(12) # rear wheel
self._ble.gatts_write(self._handleSpeedLoc, dat)
dat = bytearray()
dat.append(0x02)
dat.append(0x00)
self._ble.gatts_write(self._handleSpeedControl, dat)
def _irq(self, event, data):
if event == _IRQ_CENTRAL_CONNECT:
conn_handle, _, _ = data
self._connections.add(conn_handle)
elif event == _IRQ_CENTRAL_DISCONNECT:
conn_handle, _, _ = data
self._connections.remove(conn_handle)
self._advertise()
elif event == _IRQ_GATTS_INDICATE_DONE:
conn_handle, value_handle, status = data
def setSpeed(self, speed, notify=False, indicate=False):
self.lastWheelRev += 1
self.lastWheelEvent += int(15500 / speed / 2)
data = bytearray()
data.append(0x01) # wheel rev present
data+= ((int(self.lastWheelRev)).to_bytes(4, 'little'))
data+= ((int(self.lastWheelEvent)).to_bytes(2, 'little'))
self._ble.gatts_write(self._handleSpeed, data)
if notify or indicate:
for conn_handle in self._connections:
if notify:
self._ble.gatts_notify(conn_handle, self._handleSpeed)
if indicate:
self._ble.gatts_indicate(conn_handle, self._handleSpeed)
def _advertise(self, interval_us=100000):
self._ble.gap_advertise(interval_us, adv_data=self._payload)
def app():
ble = bluetooth.BLE()
ergo = BLEErgo(ble)
dat = bytearray()
while True:
while uart.any():
dat += uart.read()
if len(dat) > 14:
speed = dat[7]
cadence = dat[6]
power = dat[5] * 5
pulse = dat[14]
if cadence == 0:
cadence = 1
if speed == 0:
speed = 1
dat = bytearray()
print ("Geschwindigkeit: " + str(speed))
ergo.setSpeed(speed, notify=True, indicate=False)
time.sleep_ms(100)
else:
#ergo.setSpeed(42, notify=True, indicate=False)
time.sleep_ms(1000)
if __name__ == "__main__":
app()