Ich möcht in diesem Beitrag zeigen, dass man Signalerarbeitung auch ohne viel Theorie und Mathematik hinbekommt und hab dafür eine Bibliothek geschrieben, die klein, supereinfach zu verwenden und vorallem auf einem ESP mit Micropython ihren Dienst tuen kann.
Continue readingKategorie: Allgemein
Allgemein
BLE Sensoren mit Micropython (Daum Ergometer als Sensor)
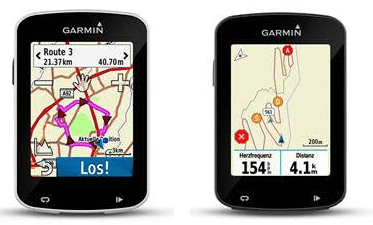
Mein Vermieter Hans fragte mich neulich ob man irgendwie die Daten seines Ergometers (ein altes Daum ergo_bike) in seinen neuen Fahrradcomputer ( Einen Garmin Edge 820 ) bekommen kann,
da er in seinem Fahrradcomputer gerne seine gesamten Fitnessdaten für Rennrad und Ergometer hätte

Bei Daum bekommt man für das ergo_bike eine schöne Schnittstellenbeschreibung:
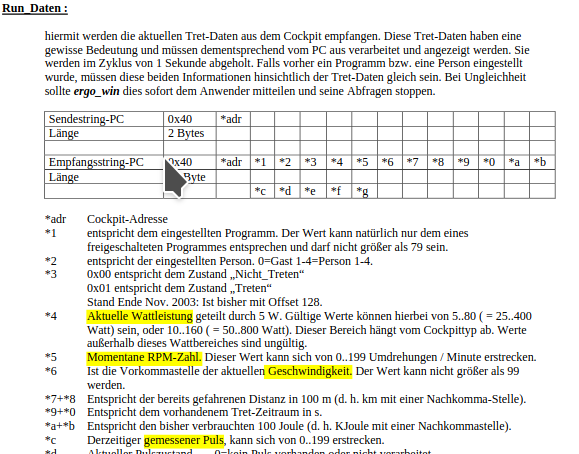
Man kann erkennen, dass die sog. Run_Daten alles enthalten was man so braucht – Leistung, Trittfrequenz, Geschwindigkeit und Puls
Auf der Rückseite des Cockpits findet man den zugehörigen Stecker (oben):

Der Stecker sieht zwar wie RS-232 aus, hat aber etwas andere Pegel (Daum verwendet statt max232 2 Optokoppler für RX und TX) – Deswegen ein PullUp an pin 2 des MAX232.
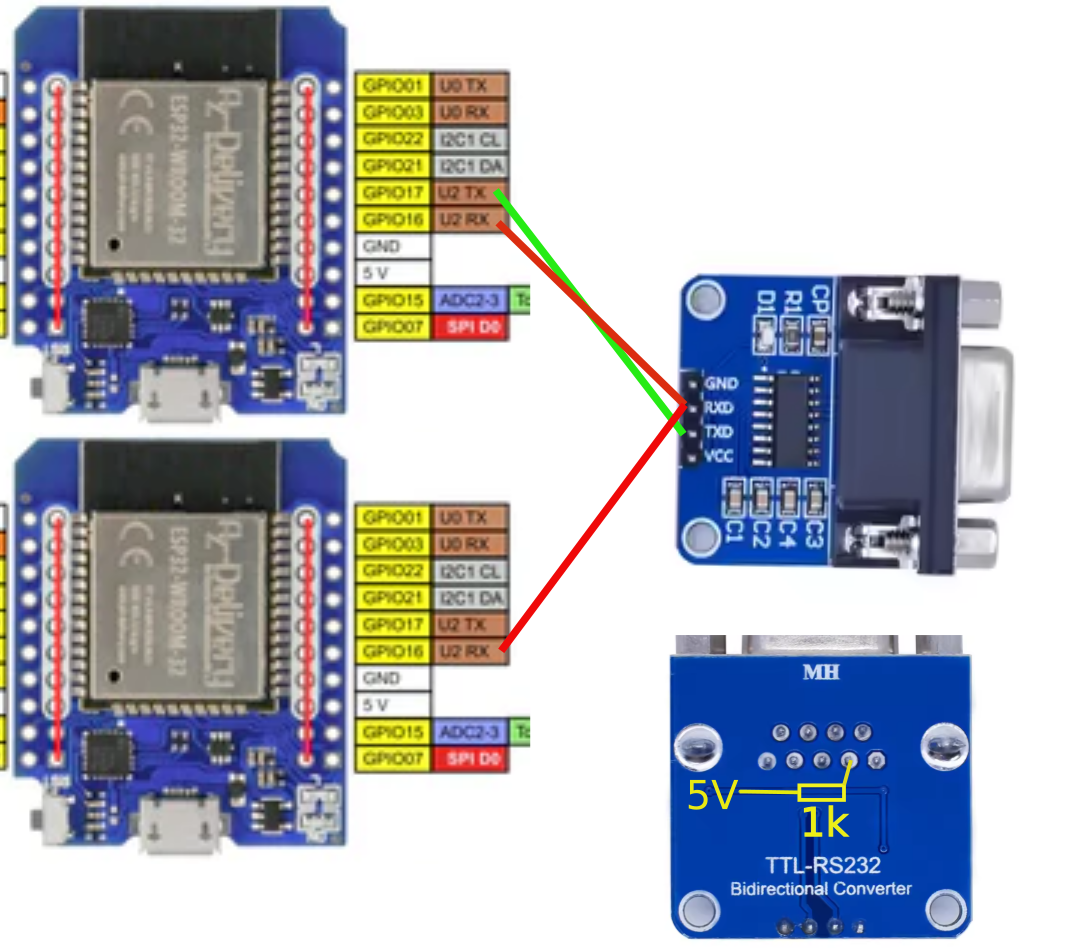
GND und VCC hab ich der Übersichtlichkeit halber nicht eingezeichnet (und natürlich weil ich faul bin 🙂 )
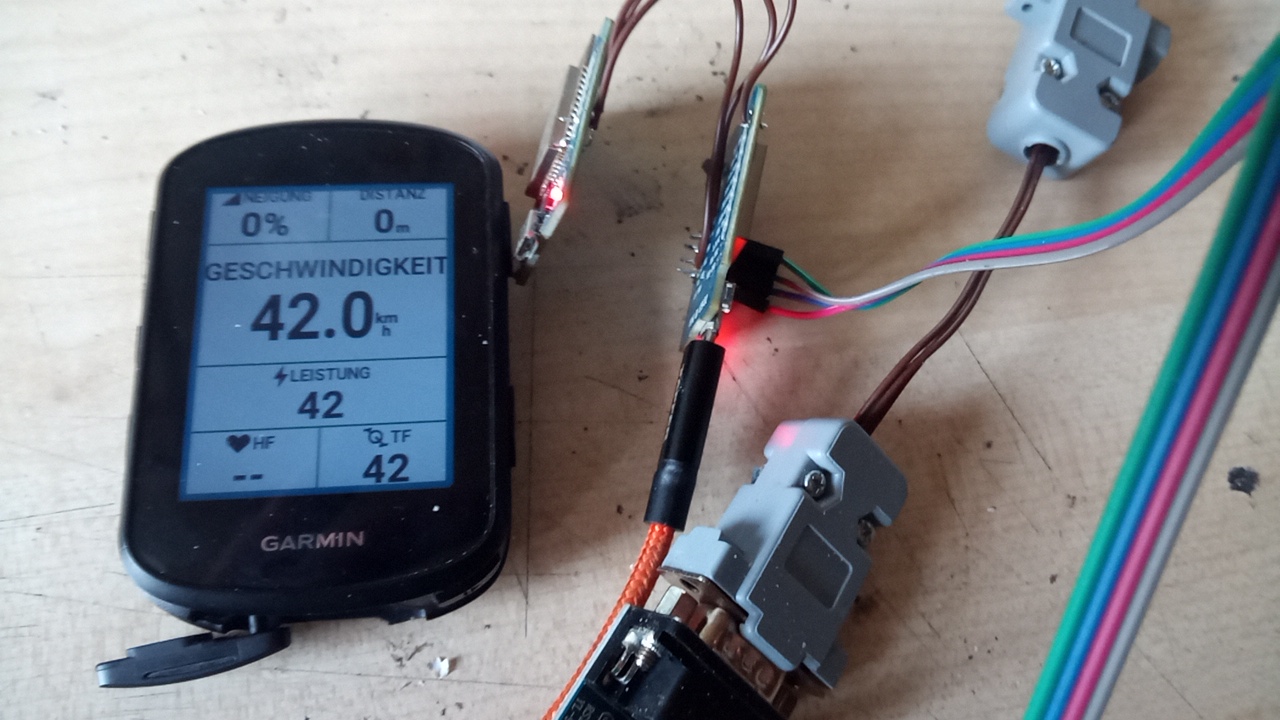
Das war schon die Hardware – du wirst dich wundern warum 2 ESP32. Leider hat der Fahrradcomputer mehrere Sensoren pro Gerät nicht verstanden und es ging nicht anders 🙁
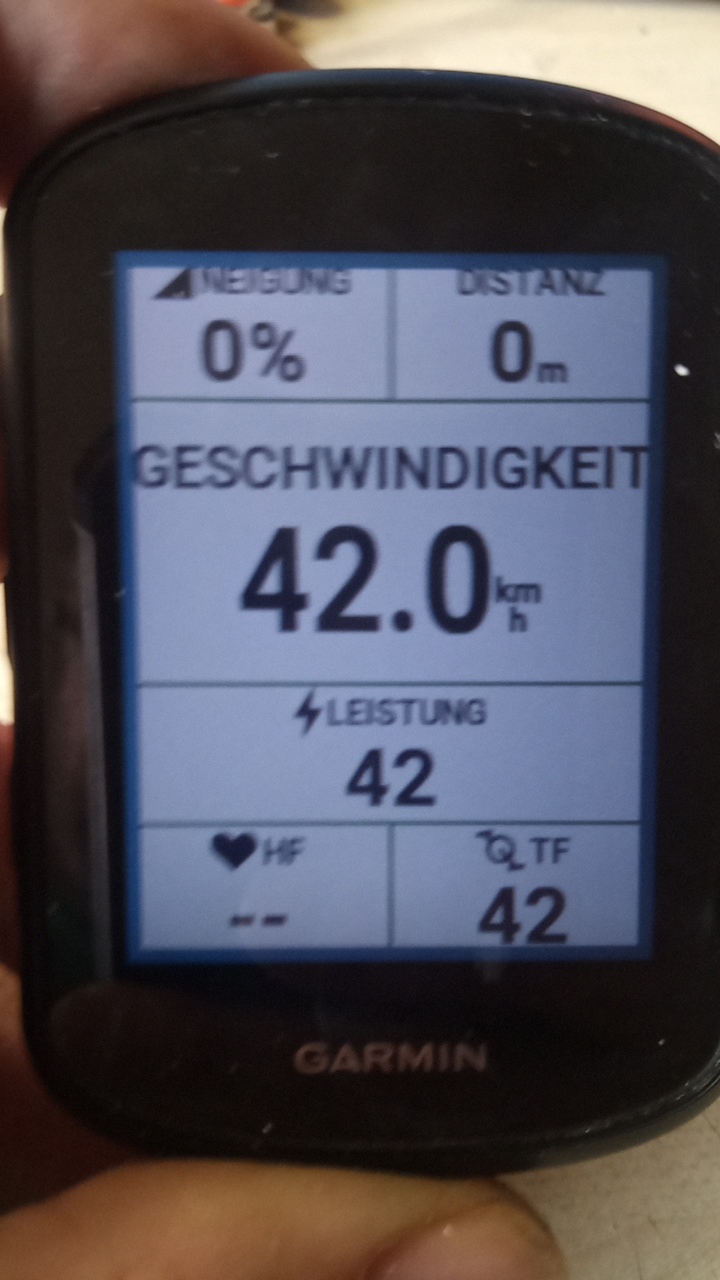
Nach etwas Micropython hats dann funktioniert:
Code Power-Sensor ( für Trittfrequenz, Leistung und Kadenz )
(oberer ESP32)
Tut mir leid, ist etwas schnell und schlampig geschrieben aber erfüllt seinen Zweck ganz gut
Du brauchst Micropython und die Datei https://github.com/micropython/micropython/blob/master/examples/bluetooth/ble_advertising.py aus den Micropython-Beispielen auf deinem Device. Natürlich hab ich mich auch großzügig an den Beispielen dort bedient – ist doch klar 🙂
Das Protokoll zwischen Fahrradcomputern und Sensoren ist am besten beschrieben unter https://www.bluetooth.com/specifications/specs/gatt-specification-supplement-5/
und natürlich viele viele andere Typen von Sensoren (z.B. Temperatur, Luftfeuchte …) man findet für fast Alles was. Vielleicht kannst du hier was brauchen für dein Sensorprojekt – es ist sehr leicht BLE-Sensoren zu implementieren ( besonders mit Micropython, finde ich 🙂 )
import bluetooth
import random
import struct
import time
from ble_advertising import advertising_payload
from micropython import const
from machine import UART
uart = UART(2, 9600)
uart.init(9600, bits=8, parity=None, stop=1)
_IRQ_CENTRAL_CONNECT = const(1)
_IRQ_CENTRAL_DISCONNECT = const(2)
_IRQ_GATTS_INDICATE_DONE = const(20)
_FLAG_READ = const(0x0002)
_FLAG_NOTIFY = const(0x0010)
_FLAG_INDICATE = const(0x0020)
_UUID_POWER = bluetooth.UUID(0x1818)
_POWER_CHAR = (
bluetooth.UUID(0x2A63),
_FLAG_READ | _FLAG_NOTIFY | _FLAG_INDICATE,
)
_POWER_FEAT_CHAR = (
bluetooth.UUID(0x2A65),
_FLAG_READ | _FLAG_NOTIFY | _FLAG_INDICATE,
)
_POWER_LOC_CHAR = (
bluetooth.UUID(0x2A5D),
_FLAG_READ | _FLAG_NOTIFY,
)
_SERVICE_POWER = (
_UUID_POWER,
(_POWER_CHAR,_POWER_FEAT_CHAR,_POWER_LOC_CHAR,),
)
SERVICES = (_SERVICE_POWER,)
class BLEErgo:
def __init__(self, ble, name="HansErgoPower"):
self._ble = ble
self._ble.active(True)
self._ble.irq(self._irq)
((self._handlePower, self._handlePowerFeat,self._handlePowerLoc,),) = self._ble.gatts_register_services(SERVICES)
self._connections = set()
self._payload = advertising_payload(
name=name, services=[_UUID_POWER]
)
self._advertise()
self.lastCrankRev = 0
self.lastWheelRev = 0
self.lastCrankEvent = 0
self.lastWheelEvent = 0
dat = bytearray()
dat.append(0x0C) # speed and cadence
dat.append(0x00)
dat.append(0x00)
dat.append(0x00)
self._ble.gatts_write(self._handlePowerFeat, dat)
dat = bytearray()
dat.append(6) # right crank
self._ble.gatts_write(self._handlePowerLoc, dat)
def _irq(self, event, data):
if event == _IRQ_CENTRAL_CONNECT:
conn_handle, _, _ = data
self._connections.add(conn_handle)
elif event == _IRQ_CENTRAL_DISCONNECT:
conn_handle, _, _ = data
self._connections.remove(conn_handle)
self._advertise()
elif event == _IRQ_GATTS_INDICATE_DONE:
conn_handle, value_handle, status = data
def setPower(self, pwr, rpm, speed, notify=False, indicate=False):
self.lastWheelRev += 1
self.lastCrankRev += 1
self.lastCrankEvent += int(60 / rpm * 1024)
rnd = int(15500 / speed)
self.lastWheelEvent += rnd
print(rnd)
data = bytearray()
data.append(0x30) # wheel and crank rev present
data.append(0x00)
data+= ((int(pwr)).to_bytes(2, 'little'))
data+= ((int(self.lastWheelRev)).to_bytes(4, 'little'))
data+= ((int(self.lastWheelEvent)).to_bytes(2, 'little'))
data+= ((int(self.lastCrankRev)).to_bytes(2, 'little'))
data+= ((int(self.lastCrankEvent)).to_bytes(2, 'little'))
data.append(0x00)
data.append(0x00)
data.append(0x00)
data.append(0x00)
data.append(0x00)
self._ble.gatts_write(self._handlePower, data)
if notify or indicate:
for conn_handle in self._connections:
if notify:
self._ble.gatts_notify(conn_handle, self._handlePower)
if indicate:
self._ble.gatts_indicate(conn_handle, self._handlePower)
def _advertise(self, interval_us=100000):
self._ble.gap_advertise(interval_us, adv_data=self._payload)
def app():
ble = bluetooth.BLE()
ergo = BLEErgo(ble)
while True:
dat = bytearray()
dat.append(0x40)
dat.append(0x00)
uart.write(dat)
time.sleep_ms(10)
dat = bytearray()
while uart.any():
dat += uart.read()
if len(dat) > 14:
speed = dat[7]
cadence = dat[6]
power = dat[5] * 5
pulse = dat[14]
if cadence == 0:
cadence = 1
if speed == 0:
speed = 1
print ("Leistung: " + str(power))
print ("Geschwindigkeit: " + str(speed))
print ("Kadenz: " + str(cadence))
ergo.setPower(power, cadence, speed, notify=True, indicate=False)
else:
ergo.setPower(42, 42, 42, notify=True, indicate=False)
time.sleep_ms(1000)
if __name__ == "__main__":
app()Code Speed-Sensor:
(unterer ESP32)
import bluetooth
import random
import struct
import time
from ble_advertising import advertising_payload
from micropython import const
from machine import UART
uart = UART(2, 9600)
uart.init(9600, bits=8, parity=None, stop=1)
_IRQ_CENTRAL_CONNECT = const(1)
_IRQ_CENTRAL_DISCONNECT = const(2)
_IRQ_GATTS_INDICATE_DONE = const(20)
_FLAG_WRITE = const(0x0001)
_FLAG_READ = const(0x0002)
_FLAG_NOTIFY = const(0x0010)
_FLAG_INDICATE = const(0x0020)
_UUID_SPEED = bluetooth.UUID(0x1816)
_SPEED_CHAR = (
bluetooth.UUID(0x2A5B),
_FLAG_NOTIFY,
)
_SPEED_FEAT_CHAR = (
bluetooth.UUID(0x2A5C),
_FLAG_READ,
)
_SPEED_LOC_CHAR = (
bluetooth.UUID(0x2A5D),
_FLAG_READ,
)
_SPEED_CONTROL_CHAR = (
bluetooth.UUID(0x2A55),
_FLAG_WRITE | _FLAG_INDICATE,
)
_SPEED_CONTROL_CHAR = (
bluetooth.UUID(0x2A55),
_FLAG_WRITE | _FLAG_INDICATE,
)
_SERVICE_SPEED = (
_UUID_SPEED,
(_SPEED_CHAR,_SPEED_FEAT_CHAR,_SPEED_LOC_CHAR,_SPEED_CONTROL_CHAR,),
)
SERVICES = (_SERVICE_SPEED,)
class BLEErgo:
def __init__(self, ble, name="HansErgoSpeed"):
self._ble = ble
self._ble.active(True)
self._ble.irq(self._irq)
((self._handleSpeed,self._handleSpeedFeat,self._handleSpeedLoc,self._handleSpeedControl,),) = self._ble.gatts_register_services(SERVICES)
self._connections = set()
self._payload = advertising_payload(
name=name, services=[_UUID_SPEED]
)
self._advertise()
self.lastWheelEvent = 0
self.lastWheelRev = 0
dat = bytearray()
dat.append(0x01) # speed
dat.append(0x00)
self._ble.gatts_write(self._handleSpeedFeat, dat)
dat = bytearray()
dat.append(12) # rear wheel
self._ble.gatts_write(self._handleSpeedLoc, dat)
dat = bytearray()
dat.append(0x02)
dat.append(0x00)
self._ble.gatts_write(self._handleSpeedControl, dat)
def _irq(self, event, data):
if event == _IRQ_CENTRAL_CONNECT:
conn_handle, _, _ = data
self._connections.add(conn_handle)
elif event == _IRQ_CENTRAL_DISCONNECT:
conn_handle, _, _ = data
self._connections.remove(conn_handle)
self._advertise()
elif event == _IRQ_GATTS_INDICATE_DONE:
conn_handle, value_handle, status = data
def setSpeed(self, speed, notify=False, indicate=False):
self.lastWheelRev += 1
self.lastWheelEvent += int(15500 / speed / 2)
data = bytearray()
data.append(0x01) # wheel rev present
data+= ((int(self.lastWheelRev)).to_bytes(4, 'little'))
data+= ((int(self.lastWheelEvent)).to_bytes(2, 'little'))
self._ble.gatts_write(self._handleSpeed, data)
if notify or indicate:
for conn_handle in self._connections:
if notify:
self._ble.gatts_notify(conn_handle, self._handleSpeed)
if indicate:
self._ble.gatts_indicate(conn_handle, self._handleSpeed)
def _advertise(self, interval_us=100000):
self._ble.gap_advertise(interval_us, adv_data=self._payload)
def app():
ble = bluetooth.BLE()
ergo = BLEErgo(ble)
dat = bytearray()
while True:
while uart.any():
dat += uart.read()
if len(dat) > 14:
speed = dat[7]
cadence = dat[6]
power = dat[5] * 5
pulse = dat[14]
if cadence == 0:
cadence = 1
if speed == 0:
speed = 1
dat = bytearray()
print ("Geschwindigkeit: " + str(speed))
ergo.setSpeed(speed, notify=True, indicate=False)
time.sleep_ms(100)
else:
#ergo.setSpeed(42, notify=True, indicate=False)
time.sleep_ms(1000)
if __name__ == "__main__":
app()
Kundenprojekt CLM ( Curved-Light-Modulator )
| Codename | CLM (Curved Light Modulator) |
| Kunde: | Jörg vom Deep Zone Experience Project |
| Projektzeitraum: | etwa 5 Monate |
| Produktive Stunden: | etwa 60 |
| Tarif: | CORmunity ( pay in beer 🙂 ) |
| Einsatzzweck: | verraten wir nicht 🙂 |
| Quellcode: | Device 200 LOC PC-Design-SW 550 LOC WEB-Page 260 LOC Android-App 200 LOC |
| Neu erworbene Skills: | Einfacher und stromsparender Aufbau von batteriebetriebenen Geräten Eigene Leiterplatten sind schnell entworfen und machen auch für Prototypen Sinn da unglaublich günstig – außerdem macht’s Spaß Miniaturisierung und Optimierung für den Low-Cost Markt (Materialkosten < 7€ bei Einzelstückzahlen) Lichtleiter mit 3D-Drucker ( danke Norbert 🙂 ) |
| Rückblick: | Es war ein sehr schönes Projekt, Jörg ist immer gut gelaunt, immer erreichbar, hat sehr gute Ideen, einen Sinn fürs Wesentliche und einen sehr netten Humor |
| Kundenstimme: | Stefan hat die Projektidee schnell und einfach umgesetzt sowie im Projekt eine Menge guter Ideen eingebracht. Das Ergebnis lässt sich sehen und wir sind auch mit überschaubaren Ausgaben zum Ziel gekommen. Ich freue mich auf die nächste Ausbaustufe. |
Firmware mit C++
Ein kleines Tutorial für die einfache Erstellung von Firmware in C++ mit Architekturbeispiel
Viel Freude damit
Continue reading